VBOT
Virtual Robotics
Overview
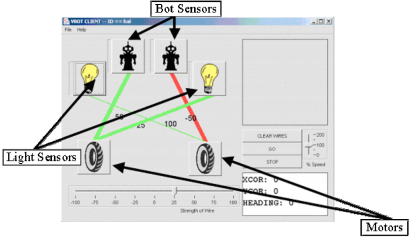
The VBOT system is a set of "Virtual roBOTics" activities based in the NetLogo and HubNet architectures. The system and activities are designed for use by students in middle school or early high school. Using VBOT, each student programs his or her own virtual robot that interacts with other virtual robots in a shared environment. Considerable work has been done with robotics in constructionist learning environments in the last twenty years; this project builds on those findings with new insights on the role of virtuality and collaboration in educational robotics. The students build simple circuits with which virtual robotic agents can perform certain collaborative tasks (e.g., flock together near a virtual light source).
Researchers
Matthew Berland and Uri Wilensky
Publications
Berland, M. & Wilensky, U. (2005). Complex play systems -- Results from a classroom implementation of VBOT. The annual meeting of the American Educational Research Association, Montreal, Canada, April 11 - 15, 2005.
Berland, M. & Wilensky, U. (2004). Virtual robotics in a collaborative constructionist learning environment. In U. Wilensky (Chair) and S. Papert (Discussant) Networking and complexifying the science classroom: Students simulating and making sense of complex systems using the HubNet networked architecture. The annual meeting of the American Educational Research Association, San Diego, CA, April 12 - 16, 2004.